







Řízení robotického manipulátoru řadicího standu (ZF Engineering)
Popis
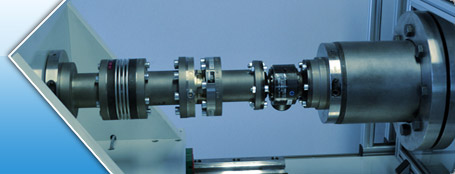
Na bázi systému REX byl vyvinut řídicí systém robotického manipulátoru řadicího stendu. Manipulátor byl navržen a zkonstruován pro potřeby testů životnosti voličů režimu jízdy u automatických převodek osobních aut (dále zjednodušeně „řadicí páky“). Provádějí se zkoušky únavy materiálu při působení sil v koncových bodech voličů, případně v bodech, kde je mechanicky bráněno v pohybu páky při určitých jízdních podmínkách. Páka voliče je uzamknuta v některých pozicích buď jištěním ovládaným v ose Z nebo elektromechanickým členem ovládaným po sběrnici CAN. Vedle samotné páky byla zkonstruována ještě jedna „paralelní“. Pohyb této druhé páky je zajištěn dvěma servomotory. Jeden zajišťuje lineární pohyb v ose X a druhý se pohybuje na vozíku v ose X a sám zajišťuje rotační otáčení páky ve směru Y. Obě páky jsou mezi sebou propojeny silovou buňkou, která měří sílu ve všech třech osách X,Y,Z. V našem případě využíváme pouze měření sil Fx a Fy, jak je to naznačeno na obrázku 1. Obě páky včetně silové buňky jsou umístěné v termokomoře, protože testy životnosti probíhají při teplotách -35, 20 a 90°C. Motory jsou již vně komory. Vývoj prováděla firma ZF Engineering ve spolupráci s týmem ZČU/KKY.
Foto


Video
Při vývoji řízení byl vytvořen kompletní model a celý systém byl testován technikami MIL a HIL.
Použitý HW a SW
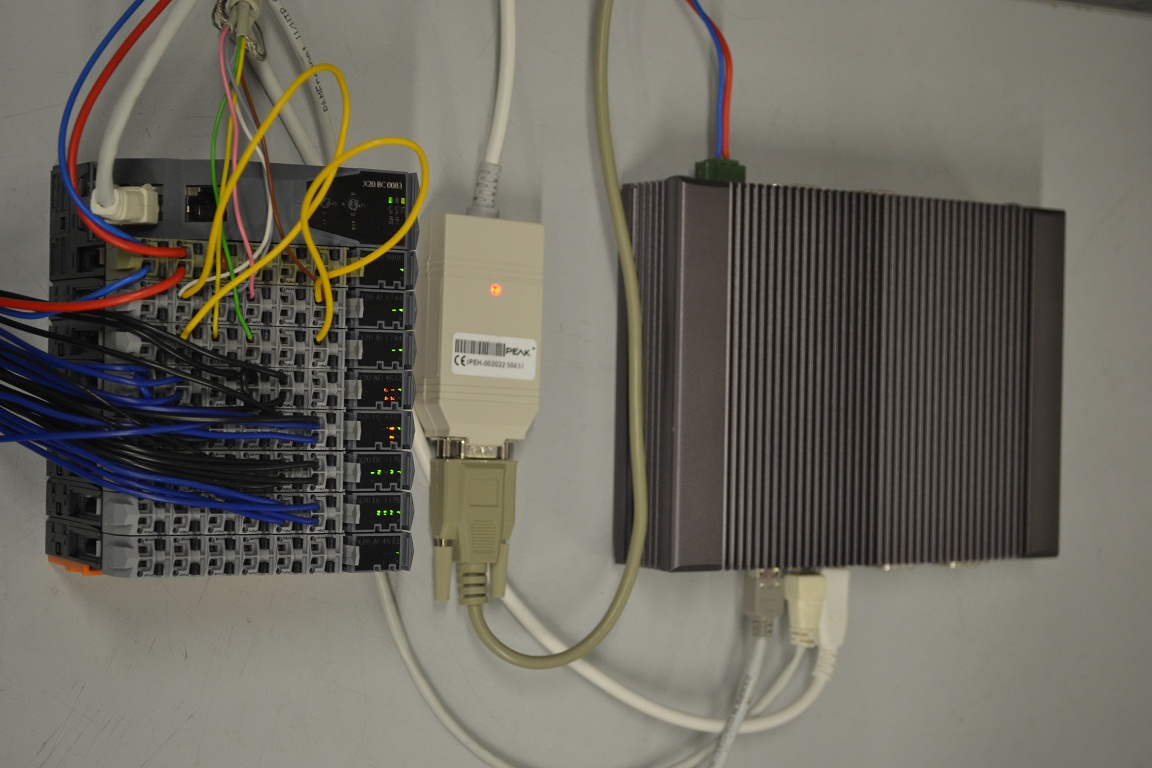
- HW: Lanner - LEC s operačním systémem Linux/Xenomai, I/O moduly B&R
- SW: Řídicí systém REX
- SW: Vizualizace - NI LabVIEW