







Řídicí systém manipulátoru pro chemicky agresivní prostředí (EuroTec JKR, ZČU)
Popis
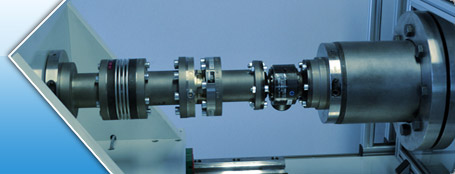
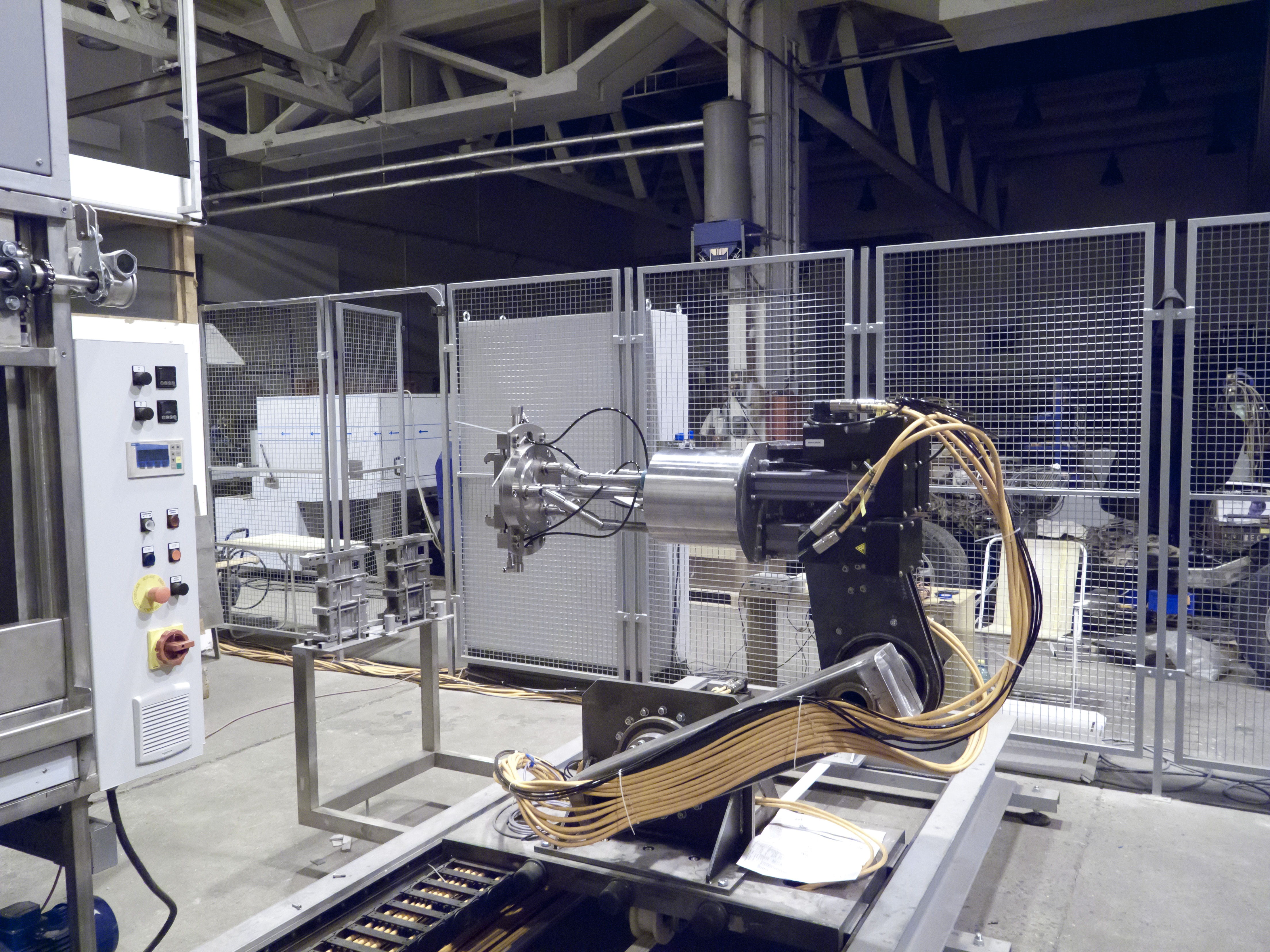
Na bázi systému REX byl vyvinut řídicí systém pro robotický manipulátor AGEBOT (AGressive environment roBOT) se vyznačuje speciální sériově-paralelní kinematickou architekturou, která byla navržena pro aplikace s nutností provozu v chemicky agresivním prostředí. V takových případech nelze nasadit standardní komerčně dostupné univerzální manipulátory, protože hrozí poškození citlivých komponent robotu (elektronika, čidla a pohony) při kontaktu se silnou chemií. Vyvinutý manipulátor řeší tento problém speciálním paralelním sférickým zápěstím se třemi stupni volnosti, které umožňuje umístit všechny citlivé komponenty mimo oblast efektoru, kde dochází ke kontatku s chemikáliemi. Vlastní pohyb efektoru je pak vykonáván pomocí soustavy lineárních pohonů a kardanových kloubů. Vyvinutý manipulátor je dodáván s automatickým počítačovým řídicím systémem, který umožňuje zadávání a parametrizaci vykonávaných pohybů, dále je vybaven operátorským rozhraním pro obsluhu stroje. Robot je primárně určen pro nasazení v technologii průmyslového odmašťování a odlakování kovových i nekovových dílů v procesu výroby dodávané firmou EuroTec JKR. V případě potřeby však může být snadno adaptován na provádění libovolné úlohy díky univerzálnímu komunikačnímu rozhraní, které umožňuje připojit nadřazený technologický řídicí systém ovládající robot pomocí standardně užívaných sériových komunikací. Vývoj byl prováděn firmou EuroTec JKR ve spolupráci s ZČU/KKY.
Foto


Video
Při vývoji byl vytvořen kompletní 3D virtuální model pro MIL simulaci.
Použitý HW a SW
- HW: Průmyslové PC s operačním systémem Linux Xenomai
- SW: Řídicí systém REX
- SW: Vizualizace - Java